-
Manual: https://docs.unity3d.com/Manual/class-Quaternion.html
-
Scripting: https://docs.unity3d.com/ScriptReference/Quaternion.html
-
Unity uses the Quaternion class to store the 3 dimensional rotation of gameobjects
- The Euler angles - the XYZ values you see in the inspector
- The Quaternion values - the underlying value which Unity stores the actual rotation of GameObjects
-
When handling rotations, you should use the Quaternion class and its functions to create and modify rotational values
- You should use the Quaternion Class functions that deal with Euler angles - Retrieving, modifying, and re-applying Euler values from a rotation can cause unintentional side-effects
-
Orientation
- Where the object is pointing at
-
Rotation
- Changing the orientation
Eulers
- Rotation order matters (XYZ, YZX Eulers results differently with the same values!)
- Gimbal locks
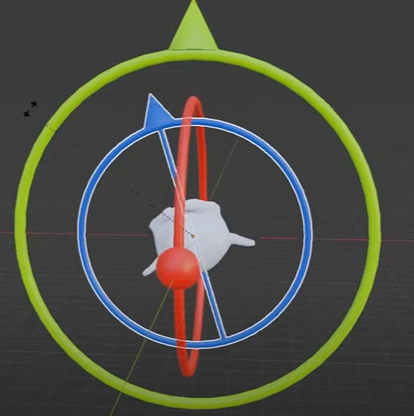
- It overlaps! The blue and green rotation represents the same axis
- Quaternions remove this issue!
Quaternions
-
used to represent rotations
-
four-tuple of real numbers
{x,y,z,w}- x,y,z aren’t an axis!!
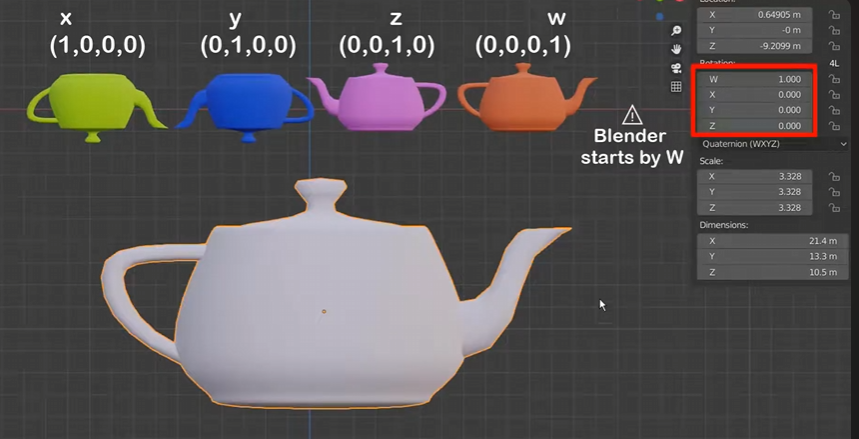
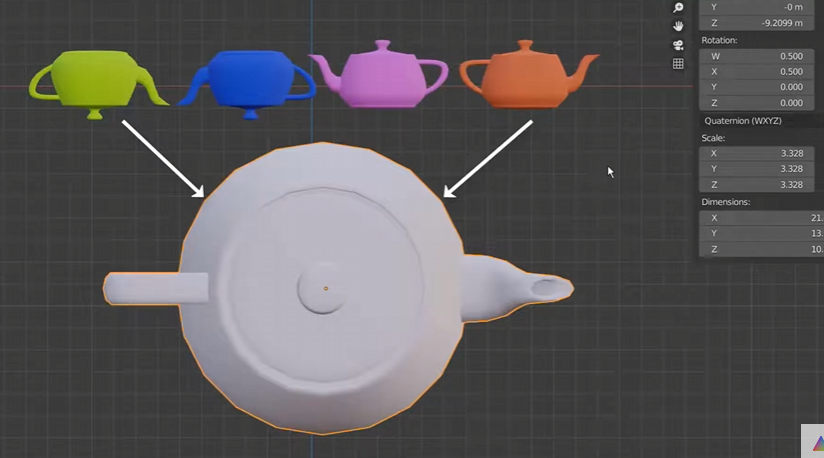
- x,y,z aren’t an axis!!
-
After normalization we have a “Unit” Quaternion
- Divide each components by its length
- It’s recommended to mormalize your quaternions